Advanced Software Applications
No matter your industry, your systems are only as efficient as your technology. We provide enterprise software solutions to streamline your industrial processes and support your revenue goals.

No matter your industry, your systems are only as efficient as your technology. We provide enterprise software solutions to streamline your industrial processes and support your revenue goals.
Quality manufacturing processes require safe and reliable buildings. E Tech Group’s engineers design redundant and reliable Building Automation Systems (BAS) to keep your facility profitable, productive, and secure.
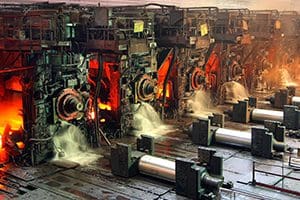
We leverage industry-leading technology to automate, streamline, and upgrade manufacturing processes. Our control systems integration services put your goals at the center.
Today's facilities and networks are at higher risk than ever before. Are you protecting your most critical infrastructure? Improve security and preparedness through E Tech Group's industrial IT engineering services.
Machine automation empowers industrial teams to focus on quality and efficiency. Our services will help you boost throughput and revenue, so you can better meet customer needs.
We maintain accurate production lines with our coordinated motion control systems, so you can mitigate downtime and conserve materials.
Your facility’s control panels can make or break an operation. Our engineers offer custom fabrication, installation, and testing of UL508A panels and more.
Create cost-effective and reliable production systems with E Tech Group's automated material handling solutions. We will help you increase throughput, quality, and system response, so you can bring in more revenue.
In biotech and pharmaceuticals, compliance is the foundation of success. We create batch control solutions with quality and efficiency in mind.
Your team is your most important resource. Are you equipped to protect them? We design, implement, and test our safety systems to guard your employees and reputation.
Increase throughput and slash downtime with our coordinated drive system design services, implemented by experts who understand your complexities.




E Tech Group is one of the United States’ largest industrial automation firms, and we partner with professionals in many industries. Here’s what they have to say.
Systems integration and automation is in our DNA as an organization, and we bring the full force of our engineering expertise to all projects.
E Tech Group supports projects nationwide, and you can be sure a physical location is close to your facility.
We’re hardware and software agnostic, meaning that we don’t deliver cookie cutter solutions.
Our history of successful automation projects and customer satisfaction has earned us top industry recognition awards.
We are the go-to resource that industrial leaders have relied on for more than 30 years.
Our long track record delivering proven automation and control solutions means we come prepared with the subject matter expertise that your project demands.
E Tech Group © 2024 | All Rights Reserved.